RCPで実機がない場合はどうすれば良いのか?
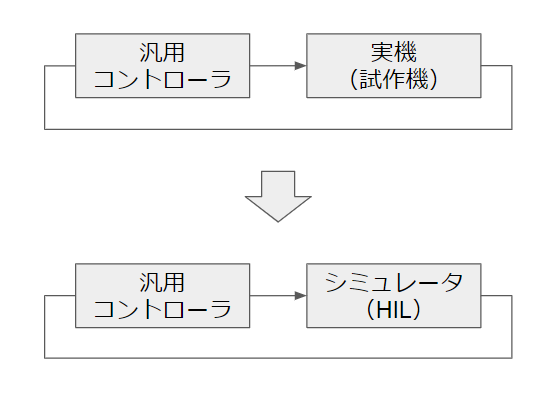
ラピットコントロールプロトタイピング(RCP)では、
汎用コントローラと実機を用いて検証しますが、
この実機(試作機、試作車)を作成することが、非常に大変です。
例えば、試作車やエンジンベンチといった試作機を作成する場合、
億レベルのコストがかかります。
もちろん、作成するまでの日数も掛りますし、
出来たとしても十分な数を用意できない場合は、開発日程の遅延にもつながります。
では、どうすれば良いのでしょうか?
実機が十分に用意できない場合はHILSを使います!
その解決策の一つとしては、下記のように実機側もシミュレータを使用します。
いわゆるHILSを用います。
実機で検証が必要なものは、実機でやるべきなのですが(例えば、実機の特性を計測するなど)
制御ロジックの機能検証を行う場合は、
HILSで検証が可能ですし、HILSで十分確認したのちに実機で検証した方が良いです。
私の同僚で、試作車に新しい制御ロジックが搭載した汎用コントローラを持って行って
ロジックに不具合が見つかり、現地デバックになり、
まったく実験できずに帰ってくる人もいました。
このようなことを防ぎ、効率的に開発していくためにもHILSの有効活用が必要です。
MILSでも可能では?
RCPとHILのモデルを使用して、
パソコン上のMATLAB/Simulinkでシミュレーション(MIL)することも可能です。
ただ、大きな違いとしては、シミュレーション時間の問題があります。
ECUやプラントのモデルサイズが大きい場合、シミュレーション時間が遅くなり、
1秒シミュレーションするのに30秒かかったりするケースがあります。
(このあたりの改善方法はあるのですが、それは別途)
大抵の方は、このシミュレーション時間に耐え切れず、MIL検証を諦める方が多いです。
一方、RCPやHILを用いるとビルド時間はかかるのですが、
リアルタイムで検証できるのがメリットです。
ビルドに時間がかかったとしても、ビルド中はそれ以外の仕事が出来るので、
あらかじめ分かっていれば、効率的に仕事ができます。
あとは、実機で検証する前に検証手順を確認することができるのもメリットです。
例えば、
・どのパラメータを計測して、どのように変化したらOKなのか、
・どのように運転操作すれば、自分の制御ロジックを検証できるのか
・制御が上手く動かない場合、何がネックになっているのか
など、事前に確認できます。
このようにHILをRCPで使用することで、
実機が十分にない場合の課題を解決することができます。
ただし、HIL自体のコストも高いため、予算と効果を考えながら、導入数を考える必要があります。
HILSは実ECUの検証用?
前述のようにHILSの使用方法は、単なるECUの検証のためではなく、
RCPにも使用することが可能なのですが、
一部の会社では、HILSは実ECUを検証するものと決めつけているところもあります。
Vサイクルの右バンクは、実ECUの検証工程と考え、
HILS自体を実験部が管理しているケースが多いですが、これはよくある誤解です。
設計と検証を同時に行っていくのがVサイクルの特徴であり、
設計と検証を部署ごとに完全に分けてしまうと、
部署間、開発プロセスに溝が出来てしまいます。
この場合、MBDを導入していても、
Vサイクルが上手く機能せず、開発の効率・品質が向上していないケースが多いです。
Vサイクルの概念自体を勘違いしている人が多いため、まずはそこを直さないと、
効率的な開発はできませんが、勘違いしている人が多く、正すのがなかなか難しいの実情です。。。